Sonar and Servos
To identify and pick up cans, multiple servos and a sonar was used. As our robot followed a tape path, the sonar looking to the right of our robot detects cans and their corresponding distances. Before the robot moves towards the can, the front servo opens the gate and moves towards the can and closes the gate. Immediately after, the other servos lifting the linkage system and dumps the cans into the bin.
A sample seqeunce is shown in the video below.
We tried to use other methods such as IR detection to drive around. However after various tests, we found that using IR sensors were difficult as the detected signal was only strong up to a certain distance away and prone to error when the sensor is at an angle with the source.
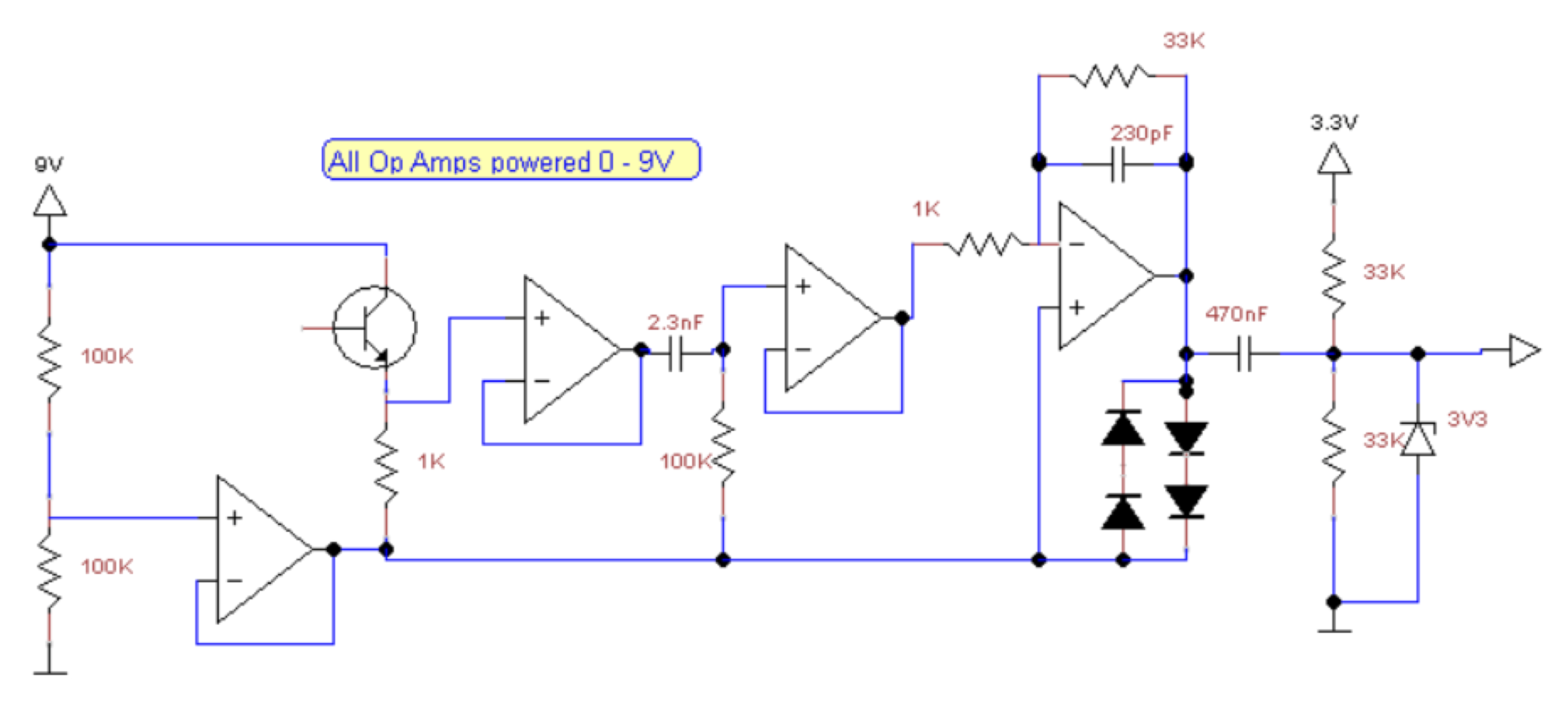
This is the IR detection schematic we built. The circuit includes a band pass filter for the IR signal from the photo transistor. We also included a 3.3V overvoltage protection using 4 diodes to protect our MCU.