Tape Following
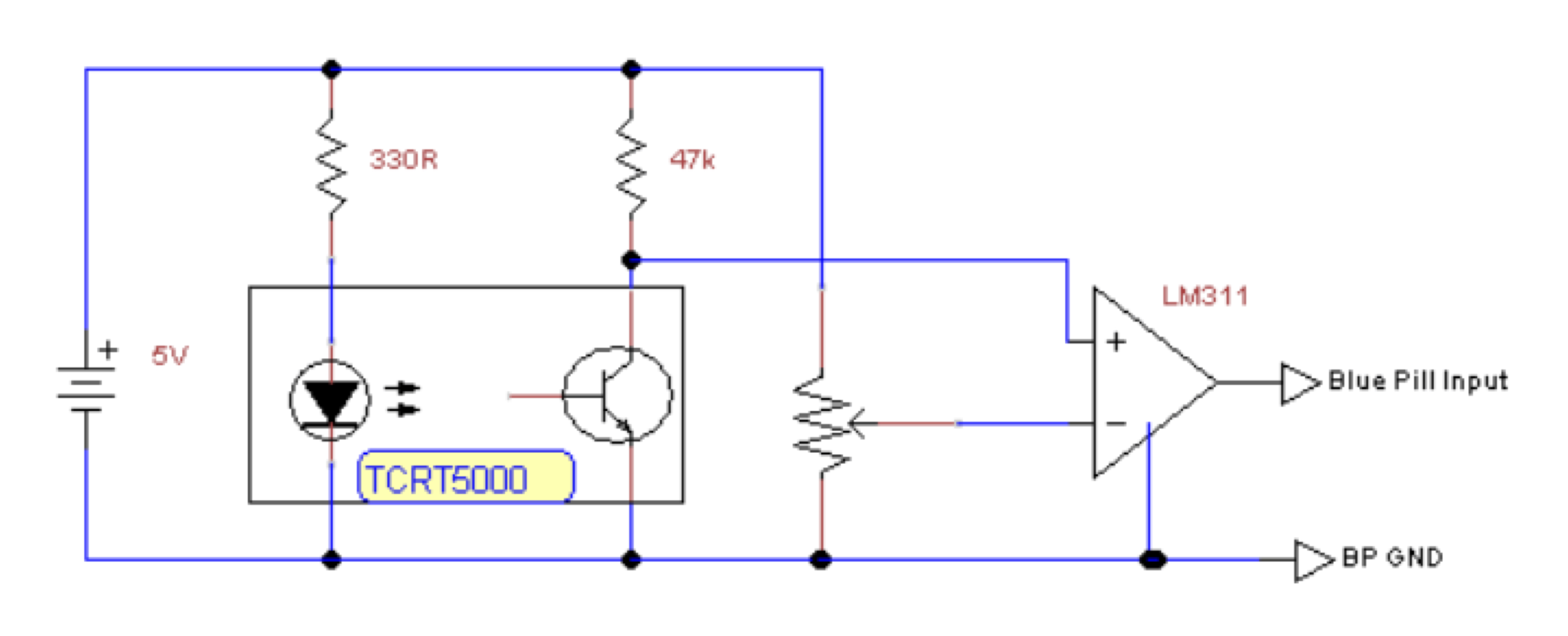
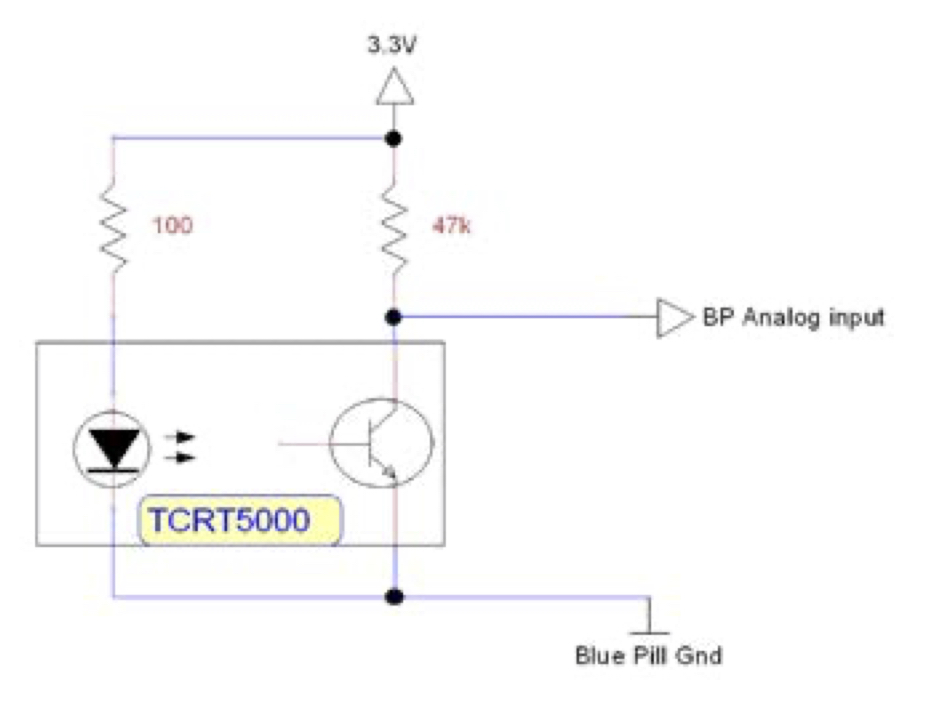
A 5 TCRT500 sensor array was used for tape following. Each TCRT500 consists of a IR led and a photo transistor which reads reflected IR waves. This was possible because of the diffeence reflectance value from the black tape and the surrounding competition floor. This array provided various states for the robot and allowed us to generate a fine-tuned PID for path following.
The schematics for the circuits are shown below. We had to use a digital tape sensor circuit using a comparator and a potentiometer to adjust thresholding because we ran out of analog pins on the MCU.